Jak vznikl kompaktní zásobník paliva pro společnost Winkler – přesně naplánovaný, digitálně integrovaný, spolehlivý v provozu
Když chtěla společnost Winkler Baugesellschaft modernizovat stávající systém, narazila na zásadní problém:
Pro stávající technologii kotle nebyl k dispozici žádný vhodný zásobník paliva s automatickým vypouštěním.
Standardní řešení byla buď příliš velká, příliš dlouhá, nebo je nebylo možné integrovat do velmi omezeného prostoru provozovny.
Právě zde projekt začal.
Původní situace – žádný sériový výrobek neodpovídal skutečnosti
Výrobce kotlového systému vysvětlil, že takový zásobník s integrovanou technologií automatického vypouštění v portfoliu sériové výroby neexistuje.
Z toho jasně vyplynulo, že je zapotřebí řešení na míru, které:
- malé nároky na prostor
- zcela zapadá do zásoby
- spolupracuje se stávající technologií kotlů
- dlouhodobě pracuje spolehlivě a s nízkými nároky na údržbu.
Prostorová situace činila úkol ještě náročnějším.
Bez digitální inventury by bezkolizní plánování nebylo možné.
Digitální základ – kompletní 3D laserový sken
Ještě před návrhem jediné součásti bylo provedeno kompletní 3D laserové skenování technické místnosti.
Z vytvořeného mračna bodů byl vytvořen digitální, milimetrově přesný obraz reálného prostředí.
Na tomto základě:
- ocelová konstrukce je modelována
- pohyblivá podlaha je integrovaná
- šroubová technologie je umístěna bezkolizně
- Hydraulika, motory, servisní cesty a přístupové prostory jsou zohledněny.
Výsledkem byla plně digitálně naplánovaná celková integrace, která přesně zapadla do stávající budovy.
Skutečná inovace: pohyblivá podlaha bez obvyklé ztráty instalačního prostoru
Klasické systémy s pohyblivou podlahou obvykle vyžadují prostor pro pohon za zásobníkem, protože hydraulický válec je umístěn osově za pohyblivou podlahou.
Tím se výrazně prodlužuje karoserie – což je problém ve stísněných instalačních prostorech.
Vyvinuté řešení tento problém zcela řeší:
✔ Uzavřená konstrukce žebříku
✔ Dva hydraulické válce umístěné na straně
✔ Synchronizovaný pohon bez axiálního výstupku
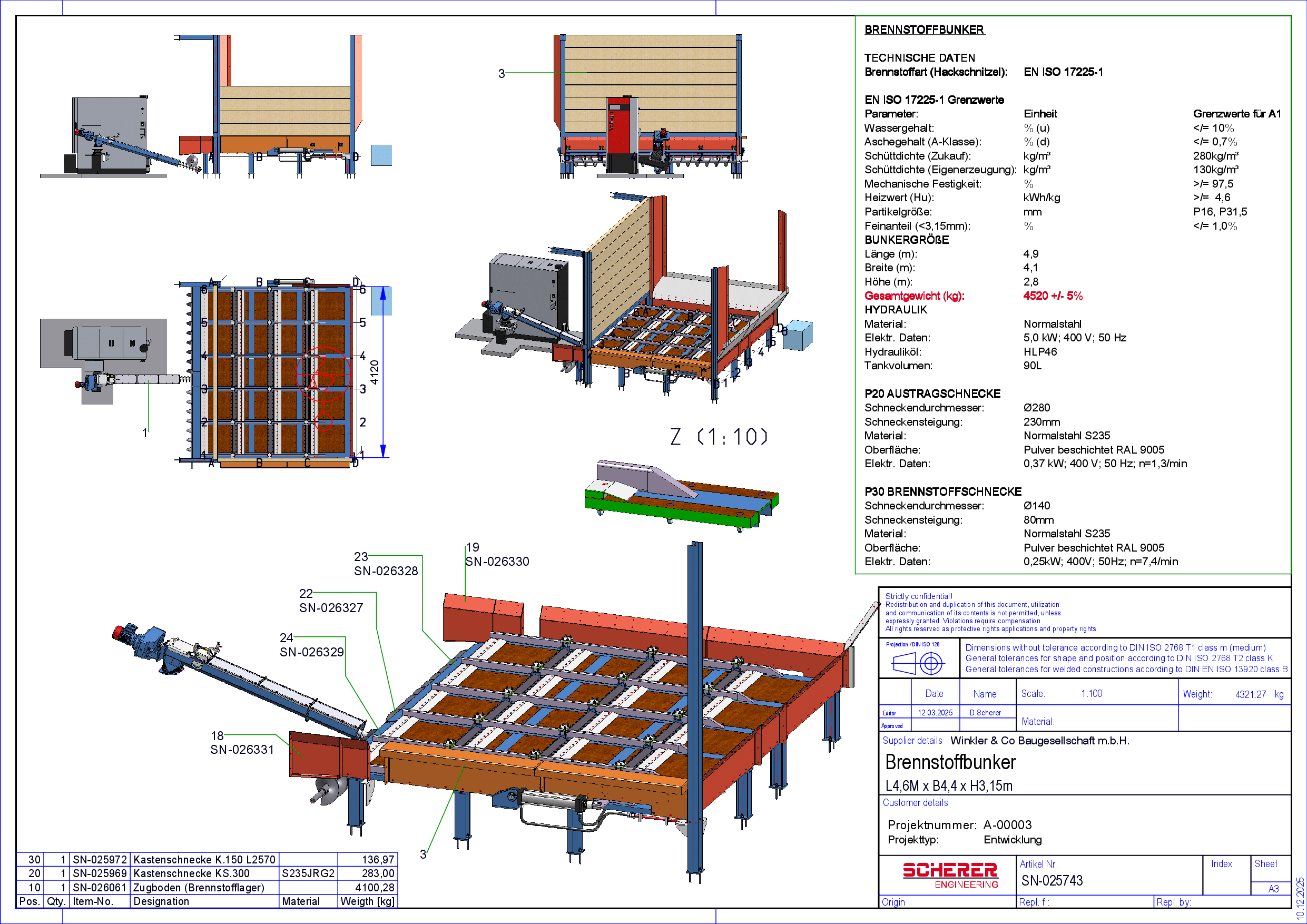
Bunkr tedy vyžaduje pouze skutečnou podlahovou plochu, tj:
- Délka 4,9 m
- Šířka 4,1 m
- Výška 2,8 m
Systém lze proto integrovat do místností, kam standardní technologie jednoduše nelze nainstalovat.
Technologie šnekových dopravníků – kontinuální zásobování palivem
Bunkr využívá dvě úrovně šroubů:
- P20 – Skříňový šnek KS.300, Ø 280 mm, 0,37 kW
- P30 – Šnek na palivo K.150, Ø 140 mm, 0,25 kW
Oba šrouby byly umístěny tak, aby:
- Vyhýbáme se rušivým hranám
- je zaručeno rovnoměrné vybíjení
- Údržba zůstává snadno dostupná
Hydraulický modul – výkonný a dokonale integrovaný
Hydraulická jednotka:
- Výkon motoru 5,0 kW
- Objem nádrže 90 litrů
- Střední HLP 46
- Návrh segmentových pohyblivých podlahových panelů
Díky tomu se pohyblivá podlaha pohybuje plynule, kontrolovaně a výkonně – i při plném zatížení.
Realizovaný kompletní systém – přesné plánování, rychlá realizace
Podle zprávy o projektu byl systém úspěšně uveden do provozu v zimě 2025 a od prvního dne fungoval stabilně, hladce a efektivně.
Celý systém zahrnuje:
- Kompaktní ocelový bunkr
- Segmentovaná pohyblivá podlaha
- Šroubová technologie pro dodávku paliva
- Hydraulický modul
- Kompletní digitální integrace do stávající technologie kotle
- Výrobní dokumentace (STEP, PDF, DXF) včetně hmotnostních a dílenských seznamů
Výsledek
Zásobník paliva Winkler ukazuje, čeho lze dosáhnout moderní integrací zařízení:
- Extrémně kompaktní konstrukce díky boční hydraulice
- Přesné digitální plánování pomocí 3D laserového skenování
- Spolehlivé vypouštění paliva díky optimalizované technologii šneku
- Vysoce kvalitní ocelová konstrukce
- Kompletní funkční integrace do stávajícího systému
- Krátká doba instalace a uvedení do provozu
Projekt dokazuje:
Když standardní technologie dosáhne svých limitů, začíná prostor pro skutečnou inženýrskou práci.
Palivový bunkr naLinkedIn